|
[Suivant] [Précédent] [Fin] [Niveau supérieur]
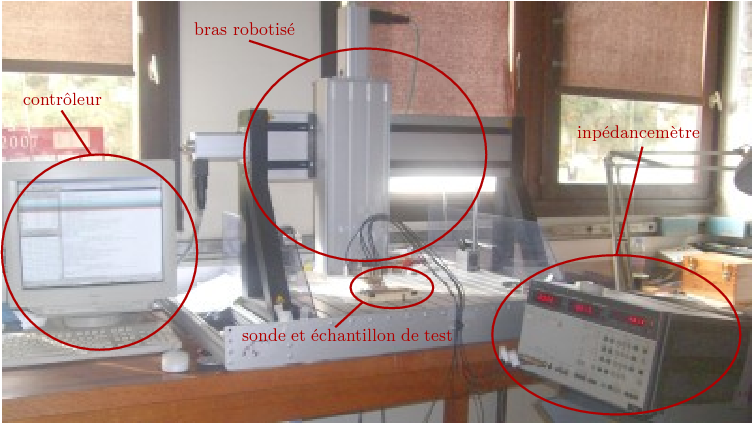
L’ensemble du matériel utilisé dans cette expérimentation est pris en photographie dans la figure 2.10. Il est composé de
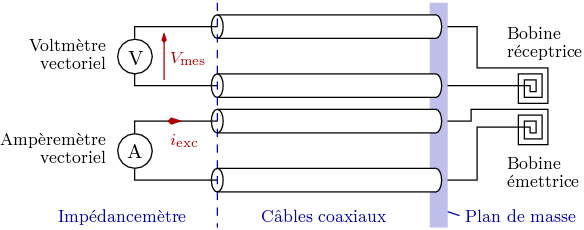
La sous-section 1.3.1.2 explique que les mesures faites pour le CND par CF sont des mesures d’impédance pour une sonde à fonction double, ou de transimpédance pour une sonde à fonctions séparées. Ces mesures sont faites ici grâce à un impédancemètre Hewlett Packard HP4192-A, ayant une bande passante de 5 Hz à 13 MHz. Les fréquences utilisées sont en pratique comprises entre 500 kHz et 12 MHz. Ce sont des mesures « 4 voies », parmi lesquelles deux voies servent à l’établissement d’un courant d’émission et les deux autres voies à la mesure d’une tension de réception. La mesure CF est le rapport complexe, prenant en compte rapport d’amplitudes et déphasage, de ces deux grandeurs. La figure 2.11 montre une photographie du montage et de l’impédancemètre.
Le câblage est assuré par quatre câbles coaxiaux de diamètre 1,2 mm. L’âme de chaque câble est utilisée pour une des deux bornes de chaque microbobine, ce qui permet de réaliser un blindage total entre l’impédancemètre et les microbobines, en déportant au plus près d’elles les quatre points de mesure. Pour que cela fonctionne, il faut que les gaines soient toutes reliées côté sonde : un plan de masse est réalisé sur un deuxième circuit imprimé contenant de plus les connecteurs des câbles coaxiaux. Ainsi le montage est isolé des perturbations électromagnétiques externes sur l’espace allant physiquement de l’impédancemètre au plan de masse, et seules les perturbations existant entre le plan de masse et les microbobines interviennent. Un schéma de la mesure effectuée, dans le cas d’une sonde à fonctions séparées, est présenté à la figure 2.123.
L’impédancemètre réalise une détection synchrone du signal de mesure. Il s’agit d’un système de filtrage dans lequel le signal de mesure s(t), composé d’un signal utile et d’un bruit aléatoire

est multiplié par le signal d’excitation, à la même fréquence f

ainsi que par le signal en quadrature de même amplitude

Le résultat de ses deux multiplications est

Ainsi, la seule influence du bruit est celle de son spectre près de f, plus précisément celle de la plage
![[f - fc,f + fc]](memoire70x.png)
Pour le bruit thermique considéré aux sous-sections 2.2.1.3 et 2.2.2.4, prendre en compte l’utilisation de la détection synchrone signifie

Ici, la documentation de l’impédancemètre annonce une fréquence de coupure inférieure à 50 Hz, ce qui diminue de façon très significative les valeurs de tension de bruit calculées.
Afin d’effectuer les mouvements de la sonde par rapport à la pièce, un bras robotisé 3 axes au bout duquel est fixée la sonde est utilisé. Il est commandé par une liaison série. Sur chaque axe, le mouvement est effectué à l’aide d’un moteur pas à pas, de façon discrétisée. Le pas de déplacement minimal est 1∕80 mm soit 12,5 μm.
L’ensemble de l’expérimentation est contrôlé par un ordinateur et plus particulièrement par l’intermédiaire du logiciel Matlab, aidé par une librairie pilote4. Pour ce faire, des scripts Matlab ont été écrits, afin de réaliser plusieurs fonctions :
Ces scripts, spécialement écrits pour ces travaux, constituent une nette avancée dans l’instrumentation utilisée précédemment dans les deux laboratoires de co-tutelle. En particulier, l’accent a été mis sur la lisibilité du code et l’ajout prolifique de commentaires permettant une réutilisation ultérieure la plus aisée possible. Tous scripts créés sont des fonctions autonomes attendant les ordres en argument et possédant des ordres par défaut. Tels quels, ils sont extrêmement versatiles et utilisables pour d’autres applications de déplacement de sonde avec acquisition simultanée.
3Le fait que le voltmètre et l’ampèremètre soient vectoriels permet de mesurer des amplitudes vectorielles, accédant ainsi à leur déphasage.
4Les quatre fonctions décrites ci-après sont entièrement gérées par Matlab et ses méthodes natives, sans l’emploi d’un logiciel externe tel que Labview ni de toolbox particulière. La librairie de pilotage de l’interface gpib a été installée au niveau du système.
[Suivant] [Précédent] [Début] [Niveau supérieur]