|
[Suivant] [Précédent] [Fin] [Niveau supérieur]
Dans le but de l’évaluation des défauts inspectés, le choix de l’inversion des signaux CF a été porté vers l’estimation des caractéristiques des défauts, c’est-à-dire le processus de caractérisation. Cependant, les signaux CF originaux contiennent un grand nombre de données, à savoir une valeur d’impédance complexe à chaque point de mesure. Cela complique fortement l’inversion, qu’elle soit itérative ou directe.
Ces données, valeurs des signaux CF situées les unes à côté des autres, sont très dépendantes entre elles, et toutes ne sont pas nécessaires pour l’inversion. Diminuer le nombre de ces données permet de simplifier le processus de caractérisation. La paramétrisation des signaux CF, par la sélection des données utiles, réalise cette simplification[Ouk97].
Parallèlement à la nécessité de réduction du nombre de données caractérisant le signal CF, il est important que les paramètres définissent au mieux le signal, afin que le moins possible d’information contenue dans le signal ne soit perdue.
Beaucoup de paramètres peuvent être choisis. Comme expliqué à la sous-section 3.1.2, les représentations de type signatures permettent une définition plus aisée de ces paramètres et facilitent donc la paramétrisation. Il est possible de séparer les paramètres en deux classes, selon qu’ils correspondent à une signature CF ou à une combinaison de signatures CF.
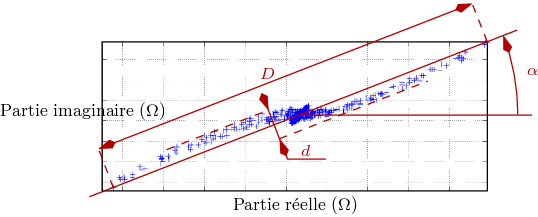
La signature CF est une des représentations possibles du signal CF. Elle a été présentée à la sous-section 3.1.2. Elle permet de visualiser l’ensemble des valeurs complexes de l’impédance acquises aux différents points de mesure, dans le plan complexe. Trois paramètres peuvent y être déterminés, indiqués sur la figure 5.4 :
La détermination de l’angle d’inclinaison est effectuée conjointement à la transformation en amplitude principale exposée à la section 3.1.3. L’angle d’inclinaison α est celui séparant l’axe réel du plan complexe de la droite de projection définie par la transformation. À partir des coefficients a et b de la droite d’équation 3.2, définis par les équations 3.6 et 3.7, l’angle d’inclinaison (en degrés) s’écrit
La dynamique principale est la dynamique de l’amplitude principale, calculée simplement par

où s′ est l’amplitude principale4,
signal réel contenant les valeurs de la projection orthogonale du signal CF complexe s sur la droite
d’angle d’inclinaison α par rapport à l’axe réel, ou encore
sur la droite
d’angle d’inclinaison α par rapport à l’axe réel, ou encore
![( ) ( )
D = max bℜ [s(ni,nj)]- aℑ [s(ni,nj)] - min bℜ [s (ni,nj)] - aℑ [s(ni,nj)]
ni,nj ni,nj](memoire264x.png)
De même, d est la dynamique de la projection sur la droite perpendiculaire notée s′′ et s’obtient avec
![′′ ′′
d = mnai,xnj s (ni,nj)- mnii,nnj s (ni,nj)
( ) ( )
= mnai,xnj aℜ [s(ni,nj)]+ bℑ [s(ni,nj)] - mnii,nnj aℜ [s(ni,nj)]+ bℑ [s (ni,nj)]](memoire265x.png)
La combinaison des signaux CF, décrite à la sous-section 3.2.2, permet de multiplier le nombre de ces paramètres par 3. En effet, chaque défaut, inspecté par deux sondes d’axes principaux perpendiculaires entre eux, donne trois signaux CF :
Ainsi sont obtenus les paramètres α∥, α⊥, αc, D∥, D⊥, Dc, d∥, d⊥, dc. Le mode combiné produit un signal CF identique pour deux défauts perpendiculaires entre eux : il sera souvent préférable d’utiliser, parmi les paramètres définis précédemment, ceux calculés sur des signatures CF combinées.
D’autres paramètres peuvent être calculés à partir des trois signaux CF correspondant à un même défaut, en utilisant plusieurs paramètres parmi les précédents. En faire une liste exhaustive serait fastidieux et relativement peu utile, à cause des multiples possibilités. Un grand nombre de ces possibilités a néanmoins été étudié. Cette étude a permis de sélectionner les paramètres les plus intéressants, comme présenté à la sous-section 5.4.2.
4L’amplitude principale est l’amplitude signée de l’impédance mesurée, définie à la sous-section 3.1.3, page 154.
5Les notations des 6 modes m∥i, m∥ij, m⊥i, m⊥ij, mc,i et mc,ij, ont été introduites à la sous-section 3.2.2, page 177.
[Suivant] [Précédent] [Début] [Niveau supérieur]