3.4 La décimation
Les signaux CF présentés dans ce chapitre ne sont pas des signaux continus. Ils sont quantifiés dans les
valeurs de leurs parties réelle et imaginaire, parce que l’impédancemètre utilisé est numérique avec
un pas de quantification de 1 mΩ en résistance et en réactance. Cette quantification n’est pas
importante ici, car les dynamiques typiques des signaux CF observés sont plus de 10 fois supérieures à
cette valeur. D’autre part, ils sont échantillonnés dans l’espace, par l’utilisation d’un système
robotisé et la prise de mesure discrète avec un pas d’échantillonnage spatial choisi à 100 μm ou
200 μm.
3.4.1 Pourquoi la décimation ?
Dans l’optique d’une acquisition dans des conditions réalistes, la rapidité d’exécution est un
facteur essentiel à la viabilité d’un système de CND. Il a déjà été dit dans le chapitre 1 que
la technique des CF compte parmi ses avantages la rapidité d’acquisition, car l’établissement
des courants induits et des champs électromagnétiques est quasi-immédiate, contrairement par
exemple à la technique des ultrasons qui nécessite une propagation à la vitesse du son dans
le matériau inspecté, ou à la radiographie qui nécessite un temps de pose pour imprégner le
film sensible. Il a de plus été expliqué dans la section 2.1.1 que l’intérêt principal des sondes
multiéléments est de diminuer le temps d’acquisition en prenant des mesures sans déplacement
mécanique.
Le temps total entre deux mesures de transimpédance, comprenant le temps de déplacement (pour un pas
de 100 μm), le temps de mesure et le temps de stockage des données, a été évalué à 0,37 s dans le cas des
acquisitions présentées précédemment. Cela signifie que l’inspection d’une surface de 2 mm de côté soit
212 = 441 points, comme dans le cas des signaux CF présentés aux figures 3.3 ou 3.10, nécessite près de
3 minutes ; une évaluation d’une zone de 2 cm de côté nécessite un temps 100 fois plus grand. Cette durée
n’est pas compatible avec des impératifs industriels. Pour être davantage réaliste, deux méthodes
existent :
- effectuer plusieurs mesures simultanées, à l’aide d’une matrice multiéléments ;
- relever un nombre plus faible de mesures en augmentant le pas d’échantillonnage spatial
de déplacement de la sonde.
Les deux démarches peuvent être menées conjointement. Par exemple, une matrice multiéléments à deux dimensions
de bobines micromoulées est capable, sans déplacement mécanique, de prendre au mieux une mesure tous les
millimètres
suivant les deux directions. Ceci est possible sans déplacement, par conséquent dans un temps très faible, par
l’intermédiaire d’un multiplexage temporel entre les différents groupes de microbobines. Pour obtenir un pas
d’échantillonnage spatial de 100 μm =  mm sur une zone aussi large que la sonde, il suffit de prendre
un jeu de mesures dans 10 × 10 = 100 positions différentes de la sonde, ce qui demanderait
un temps d’exécution nettement plus faible que pour une sonde de trois microbobines en ligne
balayant mécaniquement la surface. En augmentant le pas d’échantillonnage spatial à 500 μm, il
suffit alors de réaliser seulement 4 jeux de mesures, le temps d’acquisition devient alors très
faible.
mm sur une zone aussi large que la sonde, il suffit de prendre
un jeu de mesures dans 10 × 10 = 100 positions différentes de la sonde, ce qui demanderait
un temps d’exécution nettement plus faible que pour une sonde de trois microbobines en ligne
balayant mécaniquement la surface. En augmentant le pas d’échantillonnage spatial à 500 μm, il
suffit alors de réaliser seulement 4 jeux de mesures, le temps d’acquisition devient alors très
faible.
Les acquisitions effectuées dans le cadre de ces travaux permettent de simuler ce comportement et les
résultats qu’il pourrait apporter. Pour ce faire, une décimation des signaux CF mesurés est opérée. Il s’agit
simplement de prendre, sur chaque axe du plan d’acquisition, une mesure toutes les nd = pas∕100 μm, où pas
est le pas d’échantillonnage spatial du signal CF après décimation et 100 μm le pas des acquisitions
originales. nd est appelé facteur de décimation.
La valeur du facteur de décimation sera comprise dans la suite de ce document entre 1 et 10. nd = 1
correspond à aucune décimation et un signal CF décimé identique au signal CF originalement acquis, tandis
que nd = 10 correspond à un pas d’échantillonnage spatial pour le signal CF décimé égal à 1 mm,
c’est-à-dire aucun déplacement mécanique de la matrice de microbobines de deux dimensions qui aurait pu
réaliser l’acquisition.
3.4.2 Le critère de Nyquist-Shannon
Les signaux CF sont des signaux complexes bidimensionnels. Comme pour des signaux temporels, il est possible
d’analyser les variations de ces signaux à l’aide du calcul du contenu fréquentiel. Ce genre d’analyse est usuellement
mené à l’aide d’outils comme la transformée de Fourier discrète (TFD) S(fi,fj), qui pour le signal s(ni,nj)
s’écrit

où Ni et Nj sont les nombres de points de mesure suivant les axes  et
et  , Te la période d’échantillonnage
spatial soit le pas de mesure, en mm, fi et fj les fréquences spatiales en mm-1. La TFD a la propriété d’être
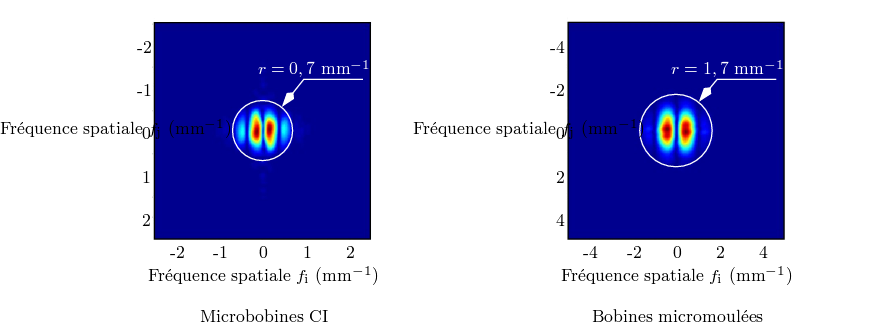
périodique de période 1∕Te. La figure 3.13 représente les modules des TFD des deux signaux CF des
figures 3.2 et 3.3 pour les couples
, Te la période d’échantillonnage
spatial soit le pas de mesure, en mm, fi et fj les fréquences spatiales en mm-1. La TFD a la propriété d’être
périodique de période 1∕Te. La figure 3.13 représente les modules des TFD des deux signaux CF des
figures 3.2 et 3.3 pour les couples  vérifiant
vérifiant
![[ ]2
(fi,fj) ∈ - -1--,-1--
2 Te 2Te](memoire156x.png)
L’énergie du signal est fréquentiellement contenue à 98% dans un cercle centré de rayon 0,7 mm-1 pour
la sonde à microbobines CI et 1,7 mm-1 pour celle à bobines micromoulées. L’échantillonnage est équivalent
fréquentiellement à un filtrage passe-bas, de fréquence spatiale l’inverse du pas d’échantillonnage. Si cette
fréquence est trop faible, un effet de recouvrement de spectre ou aliasing apparaît sur les plus hautes
fréquences du spectre du signal. Un échantillonnage correct d’un signal doit permettre de reconstruire le
signal original par interpolation. Le théorème de Nyquist-Shannon annonce que pour effectuer un tel
échantillonnage, il faut une fréquence d’échantillonnage Fe au moins supérieure au double de la fréquence
maximale du signal, soit

ou encore

Ici, cela signifie un pas d’échantillonnage spatial maximal de 0,7 mm pour la sonde à microbobines CI et
0,3 mm pour celle à bobines micromoulées. Ces valeurs correspondent, pour chaque technologie de
microbobines, à peu près au tiers de la largeur des lobes observés sur les images CF et au triple du pas
d’échantillonnage choisi pour réaliser les acquisitions, soit un facteur de décimation nd = 3. Les résultats des
algorithmes de détection et caractérisation risquent d’être fortement affectés par un facteur de décimation
plus grand.
3.4.3 Le problème du positionnement
La simulation du comportement réaliste de la sonde, avec un pas d’échantillonnage spatial supérieur à celui
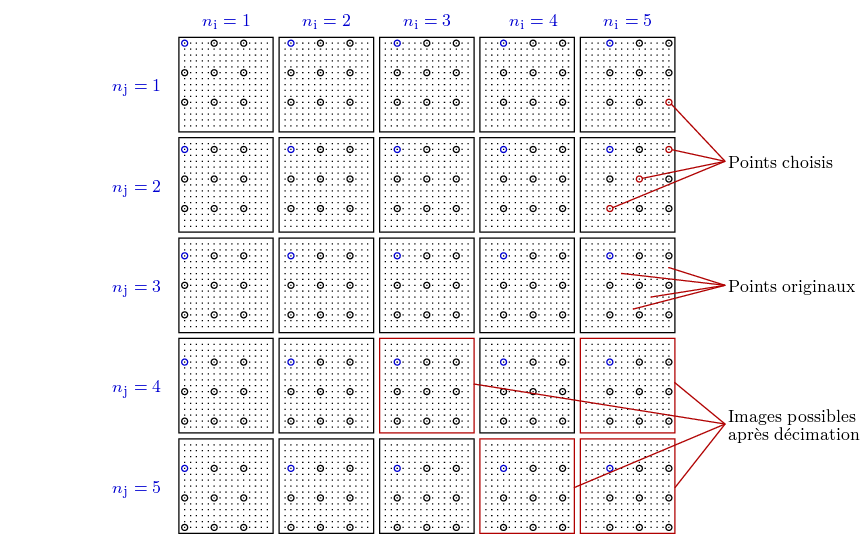
des acquisitions réalisées, requiert une décimation des signaux CF mesurés. Cette décimation, qui consiste à
ne considérer qu’un point de mesure sur nd, signifie avoir nd2 possibilités de positionnement des points de
mesure choisis par rapport au bord de l’image CF originale. La figure 3.14 montre l’exemple d’une image à
partir de laquelle est réalisée une décimation d’un facteur nd = 5, selon le choix du premier point de mesure
aux coordonnées  . Chaque cadre représente une des 25 images possibles. Chaque image possède des
points (entourés) différents de ceux des autres images, choisis parmi les points de l’image originale (non
entourés).
. Chaque cadre représente une des 25 images possibles. Chaque image possède des
points (entourés) différents de ceux des autres images, choisis parmi les points de l’image originale (non
entourés).
La dynamique d’un signal CF est la différence entre les valeurs maximale et minimale de l’amplitude
principale. Elle dépend de nd ainsi que du choix du premier point de mesure  . Elle est par conséquent
notée Dnd
. Elle est par conséquent
notée Dnd , avec nécessairement
, avec nécessairement 

![[1,nd ]](memoire165x.png) 2. Pour le cas particulier nd = 1 (pas de décimation),
est posée pour simplifier la notation D1 = D1(1,1).
2. Pour le cas particulier nd = 1 (pas de décimation),
est posée pour simplifier la notation D1 = D1(1,1).
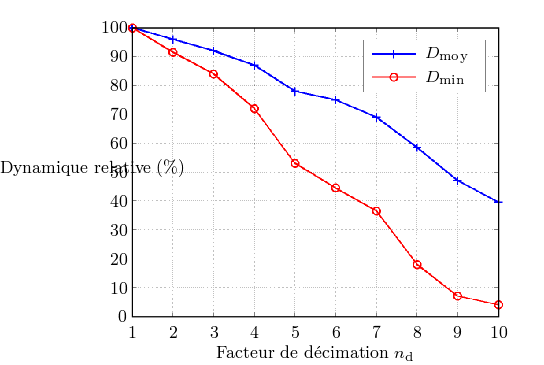
La figure 3.15 trace, en fonction du facteur de décimation, la dynamique des signaux CF après
décimation, relativement à la dynamique du signal original. Le signal original est obtenu pour le défaut
« exemple » avec la sonde à bobines micromoulées. La courbe supérieure est la moyenne sur l’ensemble des
images décimées, obtenue par la formule
![D = ∑ Dnd-(ni,nj)
moy 2 nd2 D1
(ni,nj)∈[1,nd]](memoire166x.png) | (3.8) |
où Dnd est la dynamique du signal CF décimé d’un facteur nd et auquel appartient le point de mesure
aux coordonnées originales
est la dynamique du signal CF décimé d’un facteur nd et auquel appartient le point de mesure
aux coordonnées originales  . Il est aussi intéressant de connaître le minimum des dynamiques des
signaux CF décimés
. Il est aussi intéressant de connaître le minimum des dynamiques des
signaux CF décimés
![D (n ,n )
Dmin = min 2--nd--i--j
(ni,nj)∈[1,nd] D1](memoire169x.png) | (3.9) |
qui donne l’importance de la plus grande dégradation engendrée par la décimation.
Le processus de décimation dégrade les signaux CF en termes de dynamique quasi-linéairement avec le
facteur de décimation nd. Si nd ≤ 3, les différents positionnements donnent des signaux CF assez équivalents :
la dynamique relative moyenne est supérieure à 90%, la dynamique relative minimale à 85%. À partir de
nd = 5, certains couples  produisent une chute de dynamique supérieure à 50%. Enfin, au-dessus de
nd = 9, plus de 50% de la dynamique est perdue en moyenne.
produisent une chute de dynamique supérieure à 50%. Enfin, au-dessus de
nd = 9, plus de 50% de la dynamique est perdue en moyenne.
Les deux courbes présentées à la figure 3.15 sont en fait quasiment indépendantes des dimensions du
défaut évalué et des conditions de mesure. En effet, aucun de ces paramètres ne modifie substantiellement la
forme de ces courbes ni les valeurs données au paragraphe précédent.