|
|
[Suivant] [Précédent] [Fin] [Niveau supérieur]
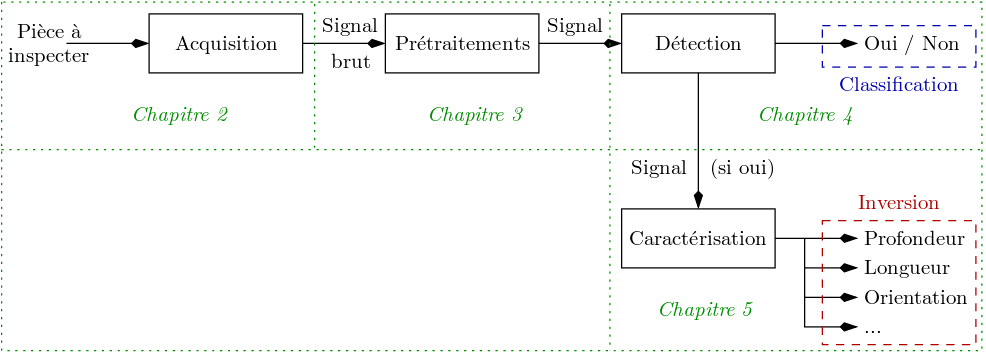
Les signaux CF acquis dans le cadre de cette étude sont utilisés pour l’inspection de défauts de type fissures parallélépipédiques submillimétriques. Cette évaluation se déroule usuellement en deux étapes. La première étape est le processus de détection, qui permet de déterminer si un signal CF correspond ou non à la présence d’un défaut. Pour les défauts détectés, la seconde étape est la caractérisation, c’est-à-dire la recherche de caractéristiques des défauts comme les dimensions géométriques, l’orientation, la position par rapport à la surface. Ces deux étapes sont aussi respectivement appelées « classification », ici au sein de deux catégories, et « inversion », c’est-à-dire passage du signal à une représentation physique, ce qui revient à réaliser l’opération inverse du processus de mesure. La figure 4.1 schématise ce fonctionnement adopté dans le cadre de ces travaux.
Le chapitre précédent a décrit l’acquisition des signaux, les signaux CF eux-mêmes ainsi que les différents prétraitements appliqués. Avant d’aborder la caractérisation des dimensions des défauts au sein du chapitre suivant, ce chapitre traite leur détection. Après avoir mis en place un algorithme de détection ainsi qu’une méthode de quantification statistique de l’efficacité de la sonde, les différentes conditions de mesure sont comparées et les plus efficaces en termes de détection déterminées. Enfin, les performances optimales de détection sont quantifiées.
[Suivant] [Précédent] [Début] [Niveau supérieur]