|
|
[Suivant] [Précédent] [Fin] [Niveau supérieur]
Toute sonde CF mesure un champ électromagnétique alternatif et comporte nécessairement des capteurs magnétiques. Plusieurs technologies existent, quatre parmi les principales sont présentées ci-après2. Les trois derniers types d’éléments sont des capteurs de champs magnétiques, ne pouvant effectuer que des mesures. L’émission du champ magnétique alternatif doit alors être réalisée par un autre élément à côté ou au-dessus du capteur.
Historiquement, les capteurs inductifs ont été les premiers éléments sensibles au champ magnétique connus. Les capteurs inductifs sont des bobines, qui peuvent être de différentes géométries, plates ou solénoïdes, et éventuellement contenir un noyau ferromagnétique afin de concentrer le champ magnétique et augmenter la sensibilité[CET+99].
Un capteur inductif transforme un champ magnétique qui le traverse en tension grâce au phénomène d’induction par la loi de Lenz-Faraday (équation 1.7). Cette loi montre que la force électromotrice créée est proportionnelle à la dérivée temporelle de l’induction : la composante continue du champ magnétique est rejetée. Pour la même raison, la sensibilité en hautes fréquences est relativement grande.
Les capteurs inductifs ont été les premiers utilisés pour des raisons historiques, mais restent encore intéressants grâce à leur précision et leur robustesse. De plus, les bobines sont bon marché et faciles à réaliser industriellement, du moins dans des dimensions raisonnables. L’inductance d’une bobine étant directement fonction de son nombre de spires[Bry55, Ter43] et donc de sa taille, les bobines de petites dimensions présentent en général une sensibilité moindre. Néanmoins, des techniques évoluées permettent aujourd’hui la réalisation de bobines de faibles dimensions avec une grande sensibilité, grâce à des formes complexes ou un grand nombre de spires[WGDG+06]. Le domaine fréquentiel d’utilisation d’un capteur inductif dépend grandement de son impédance, mais la fréquence d’utilisation est rarement inférieure à la dizaine de kHz.
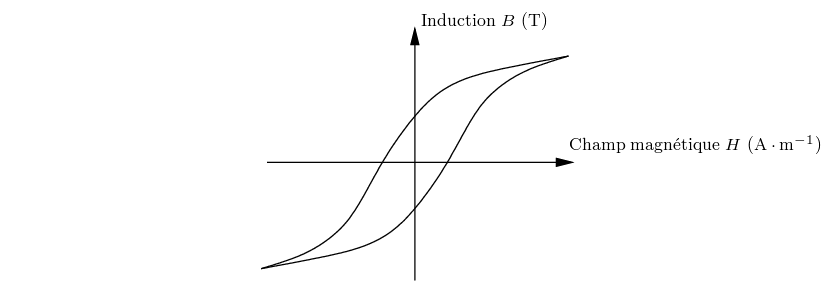
Le phénomène découvert en 1935 par Harrison[HTR35] ayant permis l’utilisation des magnétoimpédances géantes (giant magneto-impedances, GMI) repose sur l’effet de peau décrit précédemment par l’équation 1.6 et sur la courbe d’aimantation B = f(H) que montre la figure 1.9.
Une GMI peut être un simple fil ferromagnétique, traversé par un courant alternatif. Si la fréquence est assez élevée, les courants ne traversent le fil qu’en surface, la profondeur de pénétration δ devenant plus faible que l’épaisseur du fil. L’impédance du fil est alors inversement proportionnelle à δ selon l’équation
où R est la résistance en basses fréquences du fil et a son rayon.  est le nombre complexe. L’expression 1.6
de δ montre que Z dépend de la perméabilité μ du matériau. Or selon la courbe d’aimantation, le
rapport μ = B∕H dépend de la valeur de H. L’impédance varie en fonction du champ magnétique
externe[KP02].
est le nombre complexe. L’expression 1.6
de δ montre que Z dépend de la perméabilité μ du matériau. Or selon la courbe d’aimantation, le
rapport μ = B∕H dépend de la valeur de H. L’impédance varie en fonction du champ magnétique
externe[KP02].
La recherche sur les GMI dans le domaine du CND par CF a beaucoup progressé ces dernières années. Cette technologie permet de mesurer des champs magnétiques faibles sur une bande passante allant en général du continu à environ 10 kHz[VAGP07]. Il faut cependant que le champ magnétique extérieur soit supérieur au champ de saturation du matériau utilisé. Les dimensions classiques sont de l’ordre de quelques millimètres[JS04].
Les magnétorésistances géantes (giant magneto-resistances, GMR) ont été découvertes à la fin des années 1980, simultanément par les deux récents prix Nobel Fert[BBF+88] à l’Université Paris-Sud et Grünberg[BGSZ89]. Le domaine physique utilisé est l’électronique de spin, et plus particulièrement le fait que les électrons d’un spin donné, qui peut être up ou down, ne se déplacent pas à la même vitesse selon l’orientation de l’aimantation du matériau traversé. La conductivité mesurée d’un matériau est directement reliée à la vitesse des électrons le traversant par la relation

où n est la densité des électrons, q la charge élémentaire et μn la mobilité, égale au rapport de la vitesse des électrons par le champ électrique qui crée leur mouvement.
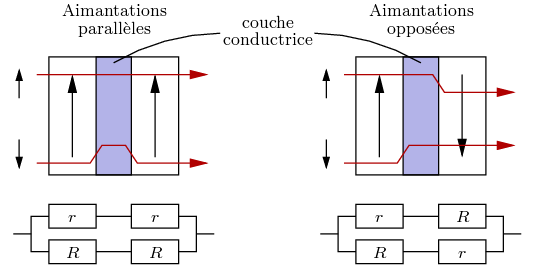
Typiquement, une GMR est composée de plusieurs couches, deux couches ferromagnétiques séparées par une couche de matériau conducteur. L’orientation de l’une des deux couches ferromagnétiques, la « couche dure », est forcée. L’autre couche, la « couche douce », a son aimantation variable : lorsqu’un champ magnétique externe est présent, elle s’aligne à ce champ ; sinon, elle s’aligne parallèlement à l’aimantation de la couche dure, par couplage ferromagnétique indirect, à travers la couche conductrice. La mesure de résistance est effectuée par passage d’un courant à travers l’ensemble des couches. Le courant peut alors être décomposé en deux courants élémentaires[HMS], celui des électrons de spin up et celui des électrons de spin down. Comme indiqué sur la figure 1.10, lorsque les deux aimantations sont parallèles, le courant up voit deux résistances r faibles et le courant down deux résistances R fortes. La résistance totale est, si r « R,
Au contraire, si les deux aimantations sont opposées ou antiparallèles, chaque courant traverse successivement une résistance r et une résistance R. Il vient alors
La résistance de la GMR varie ainsi entre ces deux valeurs extrêmes, en fonction du champ magnétique externe au capteur[Vac07].
Même si les GMR sont avant tout connues en tant que tête de lecture dans tous les disques durs actuels[DTN+05], elle sont aussi utilisées dans le domaine du CND. Les premières GMR offraient des résultats inférieurs à ceux des GMI, mais la recherche sur ce type de capteur est très active depuis vingt ans. Pour une dimension active de quelques dizaines de micromètres, un champ magnétique faible peut être mesuré[YCH+05]. Son amplitude doit être inférieure à une valeur maximale pour laquelle les aimantations des deux couches ferromagnétiques seront opposées.
On peut enfin signaler l’existence d’autres types de magnétorésistances, comme les magnétorésistances anisotropes (anisotropic magneto-resistances, AMR)[MVR08] ou les magnétorésistances à effet tunnel (tunnel magneto-resistances, TMR)[YNF+04]. Toutes ces magnétorésistances sont en général utilisées pour détecter un champ magnétique de fréquence inférieure au kHz.
Un dernier type de capteur de champ magnétique, d’une technologie assez récente, est représenté par les capteurs fluxgates. Il s’agit de capteurs formés autour d’un noyau magnétique, pouvant avoir des formes relativement diverses[Rip03]. La figure 1.11 montre trois exemples de géométries possibles. Le matériau du noyau doit avoir une courbe d’aimantation B = f(H) (cf. figure 1.9) comportant une forte saturation de l’induction lorsque le champ magnétique est élevé. Le permalloy est par exemple un matériau très utilisé dans ce type d’application.
Un enroulement excitateur entourant au plus proche le noyau est parcouru par un courant alternatif non nécessairement sinusoïdal, créant un champ magnétique alternatif dans le noyau, localement parallèle à l’axe de l’enroulement. L’induction correspondante subit une saturation, symétrique par rapport à zéro. Un autre enroulement est disposé autour du noyau, son axe étant rectiligne. Il n’est pas alimenté, et la force électromotrice créée à ses bornes est, selon la loi de Lenz, proportionnelle à la dérivée du flux de l’induction magnétique dans la ou les parties du noyau entourées. Lorsqu’un champ magnétique extérieur s’ajoute au champ d’excitation à l’endroit où est bobiné l’enroulement de réception, la saturation de l’aimantation n’est plus symétrique et la tension est déformée. Cette déformation est en général visible dans l’amplitude des harmoniques paires de la tension[Rip03]. Selon la fonction d’onde de l’excitation, il peut aussi s’agir des harmoniques impaires[PHMN+96].
Les fluxgates ont une grande sensibilité, en particulier pour les champs magnétiques continus. Ils sont ainsi très employés dans les boussoles, car ils sont capables de détecter le champ magnétique terrestre. Dans les applications CND, leur mise en œuvre demande une miniaturisation importante, ce qui leur confère une réputation de technologie relativement coûteuse.
2La technologie des SQUID (Superconducting QUantum Interference Device, dispositifs supraconducteurs à interférences quantiques) n’est pas présentée dans ce document, car ces capteurs sont encore trop complexes et contraignants à mettre en œuvre.
[Suivant] [Précédent] [Début] [Niveau supérieur]